Underwater Active 3D Measurement Method by Self-Calibration of Multiple Cross-Planar Lasers
In recent years, underwater 3D measurement has been attracting attention for its potential contribution to the fields of underwater structure inspection, underwater biology, etc., and has been actively researched and developed.
The 3D measurement in water requires consideration of light attenuation and refraction phenomena, and a method using a green cross plane laser has attracted attention as one of the most promising methods to solve these problems.
In this method, the attenuation problem can be solved by actively applying green light, which has a low attenuation rate, and the refraction phenomenon can be ignored if the laser projection plane and the refracting plane are parallel.
However, in water, the calibration apparatus and the imaging system cannot be fixed due to the influence of water flow, and the general calibration method in air cannot be used.
In addition, it is difficult to map lasers by their luminance values because the lasers are monochromatic.
The purpose of this study is to propose a robust self-calibration method and 3D reconstruction to solve these problems.
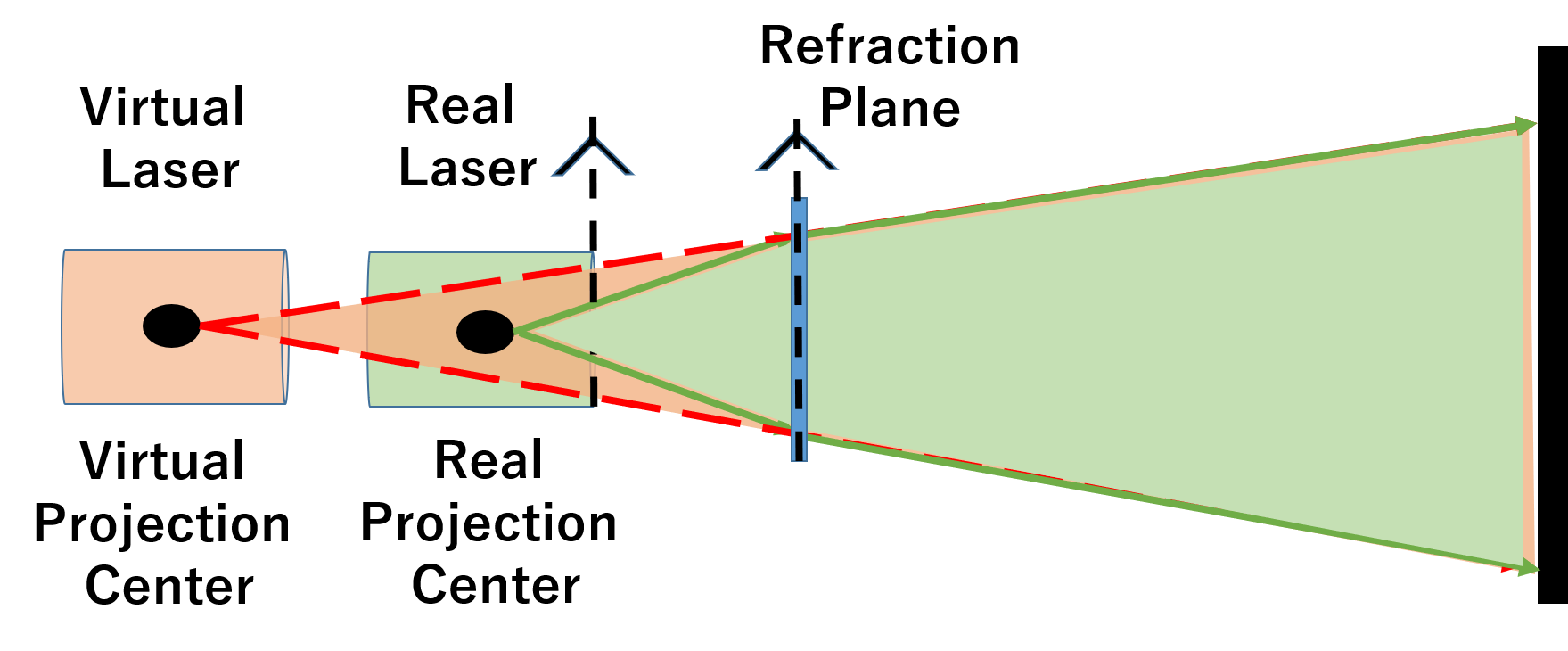
Solving the Refraction Problem with Virtual Planar Lasers
Because of the refraction phenomenon in water, the projection equation becomes a four-dimensional equation for the projected position on the refracting plane, which is difficult to optimize.
However, when using a planar laser, it is possible to reconstruct a virtual planar laser for the refracted ray by placing the refracting plane parallel to the projection plane of the laser.
Therefore, the planar laser can be represented as a perspective projection model without the refraction phenomenon.
Virtual Plane Laser
Self-calibration Using a Planar Crosshair Laser
For calibration, we used bundle adjustment, which is a common method.
However, in the proposed method, the error is calculated by reprojecting the 3D points calculated from the camera rays onto the planar laser where the refraction is negligible, instead of reprojecting the points onto the camera where the refraction is negligible.
This allowed us to avoid optimizing the projection equation, which would have resulted in the 4D equation described above.
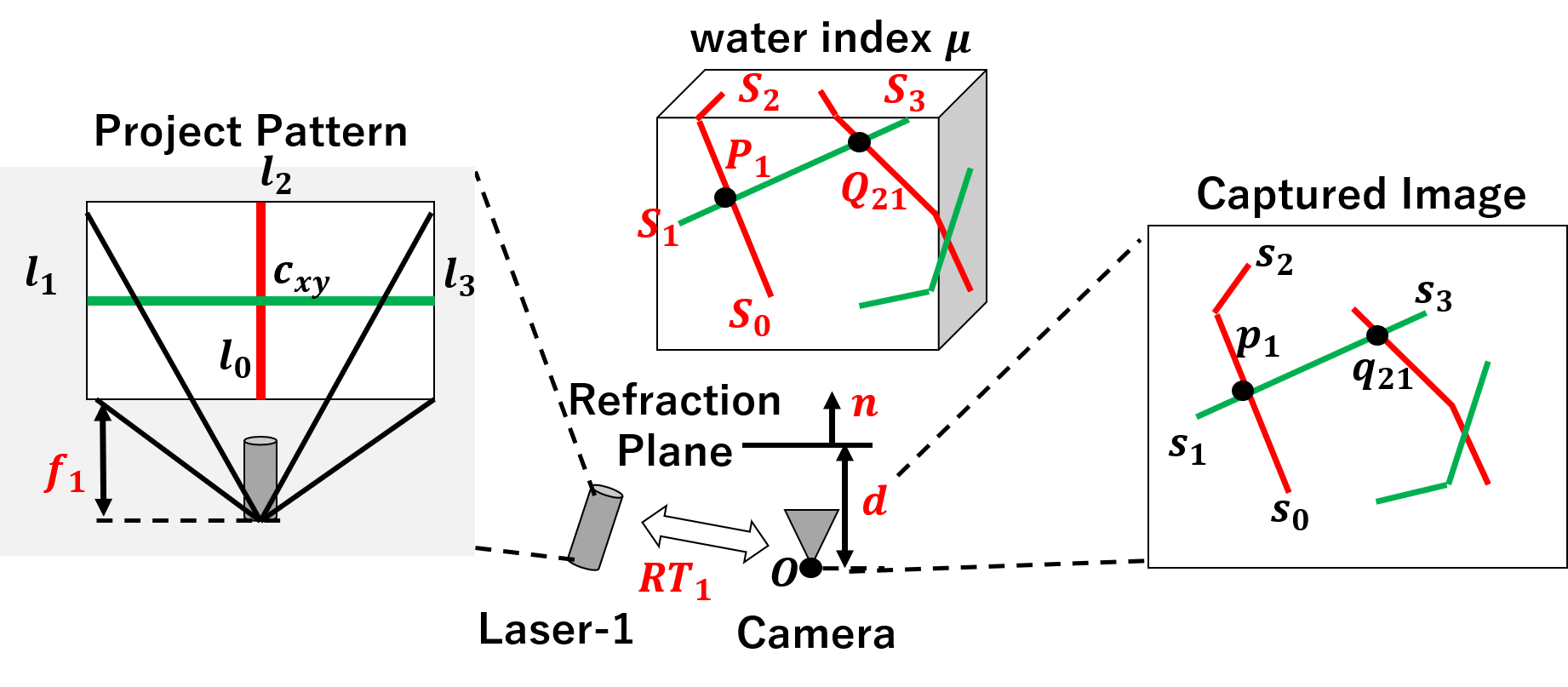
In addition to the intersection points of the planar lasers on the camera image, the end points of the lasers were used as known parameters in the bundle adjustment.
Geometry of the Imaging System (Black: known parameters, Red: unknown parameters)
Laser Detection and Mapping
The 3D reconstruction was done by optical cutting method.
In order to use the optical cutting method, we need to obtain the information of the laser.
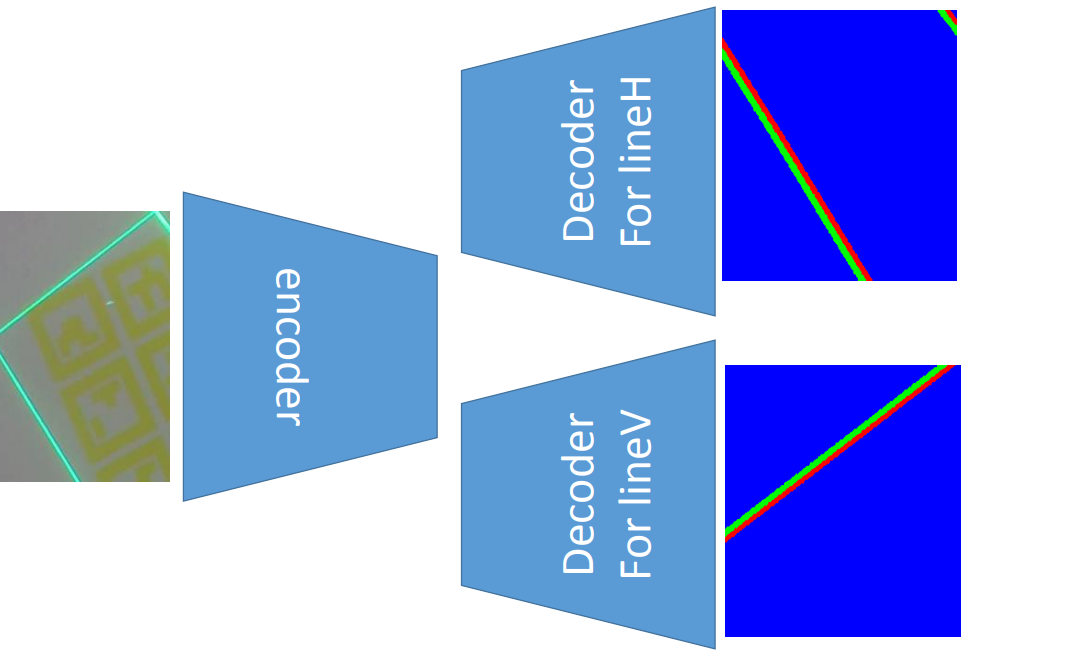
First, we use a U-Net based CNN to detect the lasers as a semantic segmentation task that classifies the captured RGB images into three labels: curve left, curve right, and background image.
In addition, we need to map the lasers.
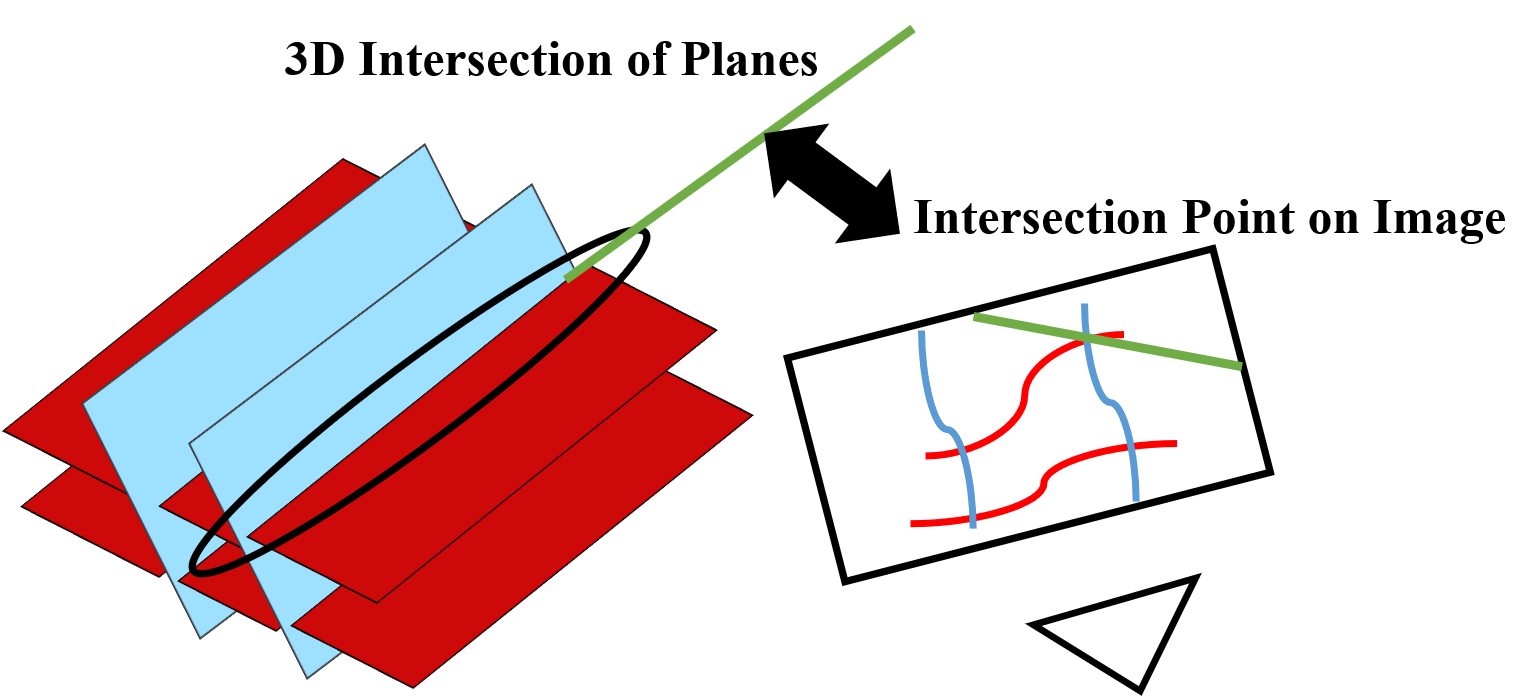
In the proposed method, since all the lasers are green in color and it is difficult to map them by their luminance values, we use the constraint based on the intersection of the planar lasers and the laser intersection in the image.
Laser Detection by CNN
Mapping of Lasers and Intersections Using 3D Line Constraints
Real Experiments in Water
To demonstrate the effectiveness of the proposed method, a 3D reconstruction of a mannequin was performed in water.
Publications
Genki Nagamatsu, Takaki Ikeda, Takafumi Iwaguchi, Diego Thomas, Jun Takamatsu, Hiroshi Kawasaki,
Self-Calibration of Multiple-Line-Lasers Based on Coplanarity and Epipolar Constraints for Wide Area Shape Scan Using Moving Camera,
In Proceedings of the 26th International Conference on Pattern Recognition (ICPR), 7 pages, 2022.