| テクスチャの取得・解析・合成
|
|
すりガラスの背後にある物体のボケをガウシアン・スプラティングにより除去する手法 [2025]
|
|
すりガラスのような光拡散によりボケが発生しているシーンの鮮明な映像の復元手法に取り組む。この研究では多視点観測を利用して、事前知識を必要としない物理ボケモデルに基づきガウシアン・スプラティングによりボケを除去する手法を提案する。
|
|
すりガラスの背後にある鏡面物体の3次元形状の微分レンダリングによる復元手法 [2024]
|
|
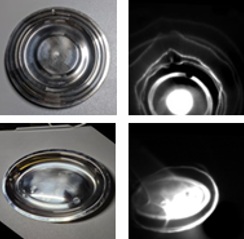
物体表面上の鏡面反射の結果生成される集光模様(コースティクス)を手掛かりにした形状復元に取り組む。この研究では照明位置を移動しながら集光模様を観測し、すべての観測の解となりえる一意の法線形状を微分レンダリングにより推定する手法を提案する。
|

|
NASおよびDiffusion Modelによる水中画像の画質改善手法 [2022-2023]
|
|
水中画像の品質改善に最適で軽量なネットワークを見つけるためのニューラル アーキテクチャ検索を紹介します。 選択可能なトランスフォーマー モジュールは、検索スペースを拡張し、堅牢な深い特徴を抽出できます。
また、拡散モデルにおけるノイズ除去ネットワークとして、Transformer ベースのアーキテクチャを提案します。 さらに、拡散モデルの推論段階のための新しい不均一サンプリング戦略を提案します。
|

|
拡散板による近接照度差ステレオ手法 [2021-2022]
|
|
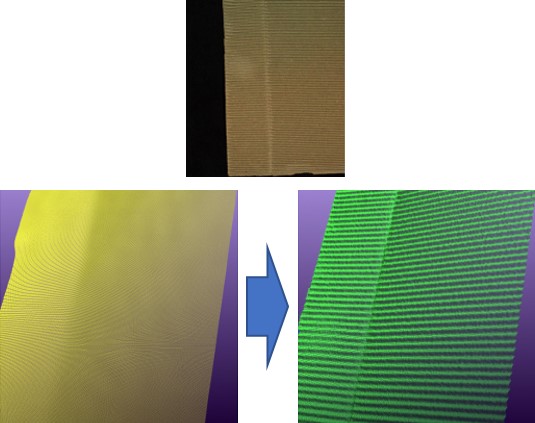
DNNにより最適化されたパターンを拡散板上に投影し,光源として利用することで,少数計測で近接照度差ステレオを実現します.
|

|
自動セグメンテーションと色補正を利用した任意物体へのブラー付加手法 [2021]
|
|
流し撮り効果を持つ動画を,ブレを持たない低画質の動画フレームとブレを持つ高画質の画像を用いることで合成します。
|
|
CNNとドメイン適応による陰影画像からの高周波形状復元 [2021]
|
|
ディープラーニングを用いて陰影画像から高周波形状を推定することによる、構造化光によるワンショット復元の高精度化。
|
|
時空間レーザースペックルパターンの低次元埋め込みによる物体表面の微小運動の推定 [2020]
|
|
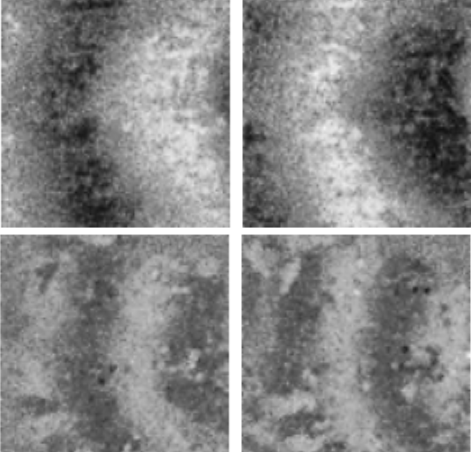
レーザー光を粗面に照射した際に発生するスペックルパターンを利用して,微小振動の推定とその可視化を行う.
|

|
複数デプス平面への同時文字分割投影プロジェクションマッピング [2019]
|
|
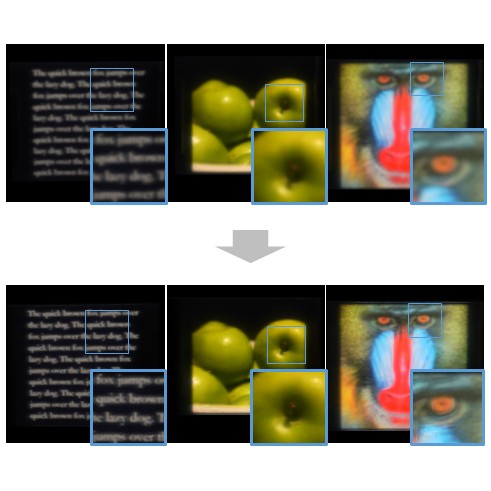
プロジェクタを複数台用いて、異なる奥行きの物体に、異なる文字を同時にプロジェクションマッピングします。
分割された文字が他の投影面では文字と認識されない効果を使用しています。
|

|
ライトフィールドカメラによる屈折フリー画像生成 [2019]
|
|
ライトフィールドカメラを用いて撮影した水中の画像から、屈折の含まれていない画像を生成します。
|

|
複数デプス平面への同時プロジェクションマッピング [2016--2018]
|
|
異なる奥行きの物体に、異なる画像を同時にプロジェクションマッピングします。プロジェクタを複数台用いて、重ね合わせを計算することで実現します。
|
|
手ぶれビデオ映像からの超解像手法 [2010--2011]
|
|
手持ちカメラで撮影する映像は複数の平面が存在する立体的なシーンで、ブレも発生します。
このような条件に対応した超解像の手法を研究しています。
|

|
時空間解析による反射・透過層の分離の屋外適用に関する研究 [2007]
|
|
室内の整った環境と違い様々な問題のある屋外環境では、デプスの違いを考慮した分離や、
ブロックマッチを利用した速度補正等を用いて、分離を適用させています。
|

|
時空間解析による反射・透過層の分離 [2006--2007]
|
|
反射物は時空間画像(EPI画像)上では色の線形和となって現れます。
この性質を利用して、透過層と反射層の分離を行っています。
|

|
アクティブ光源による反射特性、物体の見えの解析 [2006--2007]
|
|
プロジェクタとカメラを用いた3次元計測によって、幾何モデルを取得し、
同時に得られる実写画像から反射特性のパラメータの推定をすることによって
物体色(アルベド)を推定します。
|